You survived the Embodied AI Workshop and all you got was that lousy t-shirt!
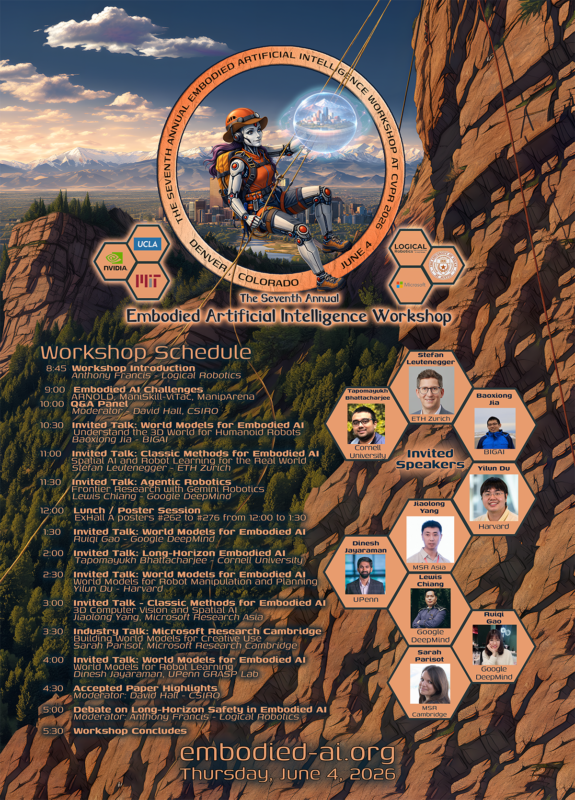
I'm promising myself not to over-complicate this post, so here's the short story: it went well! But we were making changes up to the previous day, so between the time that we printed the above poster and the actual talk, two of the speakers had changed - one speaker replaced their own backup, and another speaker who had dropped out was replaced by a volunteer speaker the afternoon before!
As CVPR (our parent conference) said, "Printed materials may be out of date ... check the website!" Which we did keep up to date: https://embodied-ai.org/cvpr2026 ... overall, though, the workshop was well attended. The best attended talk was my buddy Lewis Chiang's, a roboticist at Google DeepMind who I always thought was a superstar and I guess he's well on his way:

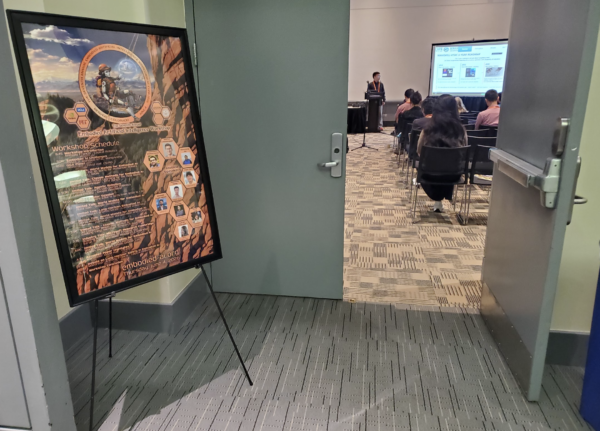
Over 70 people attended the talk and at least a dozen people were remote. While there were a few open seats up front, it still created a standing-room-only vibe:

All in all we had nine speakers, two highlight sessions for embodied AI challenges and accepted papers, a poster session, and a concluding debate. The very first picture is me, Lewis and Dinesh, another speaker at the workshop, discussing the nuances and challenges of safety in long-horizon embodied AI - a fancy way of asking "how to keep our agents from killing us if we let them loose."

There's more to say about this - CVPR is huge, so huge that it perhaps it was a mistake to go see the Backrooms movie after wandering around the massive Colorado Convention Center:

But, the long and the short of it is, we survived!

And now it's time to enjoy the rest of the conference ... at a much slower pace.

-the Centaur
Pictured: the final debate, the image of the schedule poster, the schedule poster in action, Lewis's talk, the standing room only audience, the keynote rooms, the expo floor and CVPR's massive collection of posters, the EAI7 dinner, and me in front of the expo proper. Now it's time for a nap.